Filtering is based on two fundamental ideas:
These ideas allow us to design a frequency response of interest (One that multiplies in the frequency domain to do what we want). Then, we can implement it in the time domain using convolution with the impulse response!
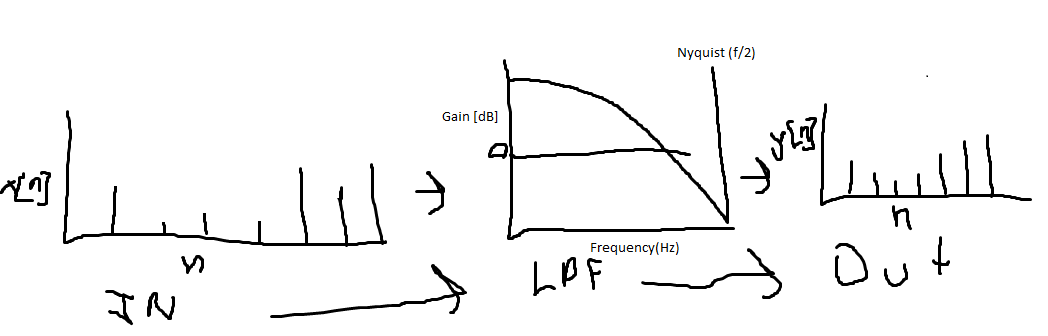 The power of FIR is that the Filter (in this case a low pass filter LPF) can be designed! This lets us control time/frequency characteristics.
The FIR is "finite" because its impulse response has a determined length. This necessarily means that the output y[n] must be stable.
(This is the case because computation of this operation in the time domain is done with Convolution which slides the filter impulse response like a window, multiplying by the input. Since the window is finite, the "sliding" operation will eventually not overlap the input, and the output will be zero)
The power of FIR is that the Filter (in this case a low pass filter LPF) can be designed! This lets us control time/frequency characteristics.
The FIR is "finite" because its impulse response has a determined length. This necessarily means that the output y[n] must be stable.
(This is the case because computation of this operation in the time domain is done with Convolution which slides the filter impulse response like a window, multiplying by the input. Since the window is finite, the "sliding" operation will eventually not overlap the input, and the output will be zero)
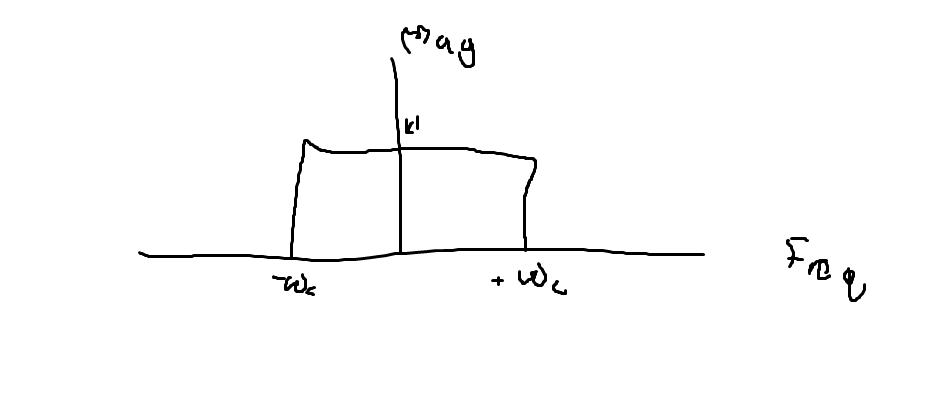 We can find our impulse response from the frequency response by taking the inverse fourier transform (equation below)
$$h(t) = \frac{1}{2\pi}\int^{+inf}_{-inf}X(w)e^{jwt}dw$$
Where $$w=2\pi f$$
However, for a rectangular pulse, we will find that our given Impulse Response is a continuous, sinc function in the time domain. This is not possible to implement since sinc functions have infinite tails, look at negative time, and aren't discrete.
We can fix this issue by shifting the response to be in positive time, discritizing, and cutting off tails. However, this introduces high frequency lobes in the frequency domain due to truncation discontinuities. This process is shown below:
We can find our impulse response from the frequency response by taking the inverse fourier transform (equation below)
$$h(t) = \frac{1}{2\pi}\int^{+inf}_{-inf}X(w)e^{jwt}dw$$
Where $$w=2\pi f$$
However, for a rectangular pulse, we will find that our given Impulse Response is a continuous, sinc function in the time domain. This is not possible to implement since sinc functions have infinite tails, look at negative time, and aren't discrete.
We can fix this issue by shifting the response to be in positive time, discritizing, and cutting off tails. However, this introduces high frequency lobes in the frequency domain due to truncation discontinuities. This process is shown below:
 We can fix these side lobes (to some extent) with windowing. Intuitively, this is smoothing out the truncation transition, getting rid of some of the high frequency characteristics that accompany it.
We can fix these side lobes (to some extent) with windowing. Intuitively, this is smoothing out the truncation transition, getting rid of some of the high frequency characteristics that accompany it.
When implementing, there are two main steps: